Some functions that can be pretty useful for someone studying Robotics, particularly Robot kinematics. Includes a tan inverse function that takes into account the quadrant, a function to return a 4x4 translation matrix x units in the x direction, y units in the y direction, and z units in the z direction, and a function to return a 4x4 rotation matrix for a body rotated by an angle "ang" about the axis "ax".
Function that returns the Taylor expansion of functions of two variables, because the Taylor function included in the Prime only works for single variable functions.
A collection of some of the most common Vector Calculus functions for rectangular, cylindrical, and spherical coordinates. Includes curl, div, Jacobian, Laplacian, unit normal, and more.
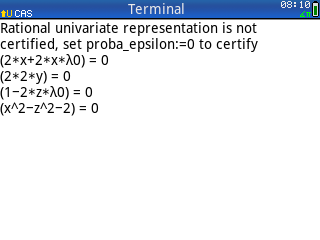 Calculates the minima and maxima of a function using Lagrange Multipliers.
Calculates the minima and maxima of a function using Lagrange Multipliers.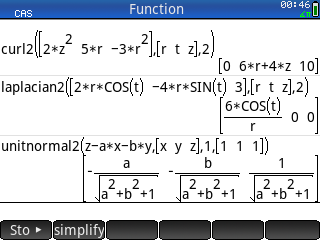 A collection of some of the most common Vector Calculus functions for rectangular, cylindrical, and spherical coordinates. Includes curl, div, Jacobian, Laplacian, unit normal, and more.
A collection of some of the most common Vector Calculus functions for rectangular, cylindrical, and spherical coordinates. Includes curl, div, Jacobian, Laplacian, unit normal, and more.