 Offers 47 equations for HP Prime's Solver App. Just run the eqlib program, select the category that you are interested in, and select the equation within that category and you are off and running. Categories include: Geometry (areas, volumes, surface areas), Finance (monthly loans, sales tax, break-even), Temperature Conversion (Fahrenheit to and from Celsius), Physics: Problems of Motion (linear distance, circular motion, pendulums, terminal & escape velocity), Sound (speed of sound, Doppler effect, loudness), Optics (Lens and Snell equations, spherical refraction), Electronics (2 resistors series and parallel, thermal noise, Ohm's Law), Astronomy (parallax, luminosity, Kepler's 3rd Law, time dilation), Great Circle Calculations, Angle of Incidence Calculations, Gases (Ideal and Boyle's Gas Laws, heat capacity, air density, isothermal expansion), and Fluids (depth pressure, fluid flow, Bernoulli's Equation). Offers 47 equations for HP Prime's Solver App. Just run the eqlib program, select the category that you are interested in, and select the equation within that category and you are off and running. Categories include: Geometry (areas, volumes, surface areas), Finance (monthly loans, sales tax, break-even), Temperature Conversion (Fahrenheit to and from Celsius), Physics: Problems of Motion (linear distance, circular motion, pendulums, terminal & escape velocity), Sound (speed of sound, Doppler effect, loudness), Optics (Lens and Snell equations, spherical refraction), Electronics (2 resistors series and parallel, thermal noise, Ohm's Law), Astronomy (parallax, luminosity, Kepler's 3rd Law, time dilation), Great Circle Calculations, Angle of Incidence Calculations, Gases (Ideal and Boyle's Gas Laws, heat capacity, air density, isothermal expansion), and Fluids (depth pressure, fluid flow, Bernoulli's Equation). |

 Educational App allowing one dimensional kinematics problems to be entered, solved using the standard kinematics formulae, and visualized as vertical or horizontal motion problems via a simple graphical representation. Includes PDF documentation.
Educational App allowing one dimensional kinematics problems to be entered, solved using the standard kinematics formulae, and visualized as vertical or horizontal motion problems via a simple graphical representation. Includes PDF documentation. Calculates the Airy functions, Ai and Bi.
Calculates the Airy functions, Ai and Bi. Program that demonstrates using the MENU touch screen function to calculate the area of various polygons -- square, rectangle, circle, triangle, and diamond.
Program that demonstrates using the MENU touch screen function to calculate the area of various polygons -- square, rectangle, circle, triangle, and diamond. Three CAS utility functions. Two of them, varslist1() and varslist2(), identify assigned variables, showing type and value. The third can be used to batch purge single-character lower-case variables.
Three CAS utility functions. Two of them, varslist1() and varslist2(), identify assigned variables, showing type and value. The third can be used to batch purge single-character lower-case variables. Performs base conversions, including fractional parts.
Performs base conversions, including fractional parts. Finds the solution to Bernoulli's Differential Equation given as: y' + g(x)*y =(x)*y^n, calculates the constant of integration C for any initial condition y(x0) = 0, if desired, and depicts the plot of the curve of y(x).
Finds the solution to Bernoulli's Differential Equation given as: y' + g(x)*y =(x)*y^n, calculates the constant of integration C for any initial condition y(x0) = 0, if desired, and depicts the plot of the curve of y(x). Program to calculate the second kind Bessel function of integer order N, for any REAL X, using the function BESSY(N,X).
Program to calculate the second kind Bessel function of integer order N, for any REAL X, using the function BESSY(N,X). Calculates the Bessel function of the first kind. Two different approaches are shown.
Calculates the Bessel function of the first kind. Two different approaches are shown. Builds truth tables for Boolean expressions. In Russian.
Builds truth tables for Boolean expressions. In Russian. Calculates the area, volume, moment of inertia, and centroid, with a list of figures to choose from.
Calculates the area, volume, moment of inertia, and centroid, with a list of figures to choose from. Give any two of the seven parameters associated with circles and chords, the other five parameters are calculated. Column A gives the seven variables definitions. Columns B thru H hole one of the variables each. As with all of the author's spreadsheets, the blue text cells are the data input cells and the red text cells are the calculated output cells.
Give any two of the seven parameters associated with circles and chords, the other five parameters are calculated. Column A gives the seven variables definitions. Columns B thru H hole one of the variables each. As with all of the author's spreadsheets, the blue text cells are the data input cells and the red text cells are the calculated output cells. Being given a circle C described by its center (xM,yM) and radius r in combination with a point P0(x0,y0) outside, Pc(xc,yc) inside or a secant defined by f(x), this CAS-program finds characteristic items like tangents T1,T2, tangential points P1, P2, chord between P1 and P2 and some more quantities.
Being given a circle C described by its center (xM,yM) and radius r in combination with a point P0(x0,y0) outside, Pc(xc,yc) inside or a secant defined by f(x), this CAS-program finds characteristic items like tangents T1,T2, tangential points P1, P2, chord between P1 and P2 and some more quantities. Does complex number calculations.
Does complex number calculations. Given cone diameter and cone height, the other eight properties are calculated. As with all of my spreadsheets, the blue text cells are the data input cells and the red text cells are the calculated output cells.
Given cone diameter and cone height, the other eight properties are calculated. As with all of my spreadsheets, the blue text cells are the data input cells and the red text cells are the calculated output cells. Finds the type and characteristic items of conic sections, if the general equation of 2nd order is given in the form: a0*x² + b0*x*y + c0*y² + d0*x + e0*y + f0 = and draws the plot after calculation.
Finds the type and characteristic items of conic sections, if the general equation of 2nd order is given in the form: a0*x² + b0*x*y + c0*y² + d0*x + e0*y + f0 = and draws the plot after calculation. For control systems stability, this will give you the Routh-Hurwitz Matrix = M25, though it will not tell you how many poles lie in the left/right planes.
For control systems stability, this will give you the Routh-Hurwitz Matrix = M25, though it will not tell you how many poles lie in the left/right planes. Yet another converter which when one system is entered(Cart., Cyl. or Sph), the other two system are simultaneously converted and all three system are displayed along with the graph showing the position of each variables on the graph.
Yet another converter which when one system is entered(Cart., Cyl. or Sph), the other two system are simultaneously converted and all three system are displayed along with the graph showing the position of each variables on the graph. Converts between rectangular, cylindrical, and spherical coordinates. This program has a restriction where one needs a unique set of coordinates for each point. Restricting the radius to be non-negative (ρ ≥ 0), the azimuth 'θ' to lie in a specific interval spanning 360° or 2π, such as (-180°,+180°] or (-π,+π] and inclination 'φ' to specific a interval spanning 180° or π, such as [0°,180°] or [0,π].
Converts between rectangular, cylindrical, and spherical coordinates. This program has a restriction where one needs a unique set of coordinates for each point. Restricting the radius to be non-negative (ρ ≥ 0), the azimuth 'θ' to lie in a specific interval spanning 360° or 2π, such as (-180°,+180°] or (-π,+π] and inclination 'φ' to specific a interval spanning 180° or π, such as [0°,180°] or [0,π]. From defined preconditions the program finds the function of return R(x) (linear or quadratic function), the function of costs C(x) =*x^3 + b*x^2 +c*x + d and calculates characteristic properties of both of them and the profit function P(x) =(x)-C(x).
From defined preconditions the program finds the function of return R(x) (linear or quadratic function), the function of costs C(x) =*x^3 + b*x^2 +c*x + d and calculates characteristic properties of both of them and the profit function P(x) =(x)-C(x). Horizontal and vertical curve calculator where you enter the curve data you have and let it calculate the rest. If one of your inputs is degree curve it will prompt for chord or arc definition. After it calculates the curve data you press OK or "Enter" to bring up the next screen with the areas.
Horizontal and vertical curve calculator where you enter the curve data you have and let it calculate the rest. If one of your inputs is degree curve it will prompt for chord or arc definition. After it calculates the curve data you press OK or "Enter" to bring up the next screen with the areas. Table of changes and delta trinomial program.
Table of changes and delta trinomial program. Finds the solution y(x) = y_hom + y_part to the differential equation (D.E.) of 4th order a*y^(4) + b*y''' + c*y'' + d*y' + e*y = g(x) or of 3rd order b*y''' + c*y'' + d*y' + e*y = g(x), where a = 0.
Finds the solution y(x) = y_hom + y_part to the differential equation (D.E.) of 4th order a*y^(4) + b*y''' + c*y'' + d*y' + e*y = g(x) or of 3rd order b*y''' + c*y'' + d*y' + e*y = g(x), where a = 0. Finds the solution y(x) = y_hom + y_part to the differential equation (D.E.) of 4th order a*y^(4) + b*y''' + c*y'' + d*y' + e*y = g(x) or of 3rd order (a = 0) b*y''' + c*y'' + d*y' + e*y = g(x), where g(x) = e^(alpha*x) * [c1*SIN(beta*x) + c2*COS(beta*x)].
Finds the solution y(x) = y_hom + y_part to the differential equation (D.E.) of 4th order a*y^(4) + b*y''' + c*y'' + d*y' + e*y = g(x) or of 3rd order (a = 0) b*y''' + c*y'' + d*y' + e*y = g(x), where g(x) = e^(alpha*x) * [c1*SIN(beta*x) + c2*COS(beta*x)]. A distance, speed and time calculator that uses the Units, MKSA, and CONVERT functions. Enter any two variables and solve for the third. When solving for the unknown variable, you need to specify the units of the unknown variable. When using h°m′s'' units for time, you need to enter the degrees, minute, and seconds symbols. One hour, 30 minutes and 45 seconds is entered as 1°30′45"
A distance, speed and time calculator that uses the Units, MKSA, and CONVERT functions. Enter any two variables and solve for the third. When solving for the unknown variable, you need to specify the units of the unknown variable. When using h°m′s'' units for time, you need to enter the degrees, minute, and seconds symbols. One hour, 30 minutes and 45 seconds is entered as 1°30′45" Being given an ellipse E described by its center (xM,yM), semi-major axis a and semi-minor axis b in combination with a point P0(x0,y0) outside, Pc(xc,yc) inside or a secant defined by f(x), this CAS-program finds characteristic items like tangents T1, T2, tangential points P1, P2, chord between P1 and P2 and some more quantities and draws the plot.
Being given an ellipse E described by its center (xM,yM), semi-major axis a and semi-minor axis b in combination with a point P0(x0,y0) outside, Pc(xc,yc) inside or a secant defined by f(x), this CAS-program finds characteristic items like tangents T1, T2, tangential points P1, P2, chord between P1 and P2 and some more quantities and draws the plot. Useful program that contains all the factors for calculations involving Economic Engineering.
Useful program that contains all the factors for calculations involving Economic Engineering. Has the program FIBMAT to generate the Fibonacci Triangle in matrix form, and the program FIBTRI to visualize the Fibonacci Triangle.
Has the program FIBMAT to generate the Fibonacci Triangle in matrix form, and the program FIBTRI to visualize the Fibonacci Triangle. Statistics program, plotting fluctuations.
Statistics program, plotting fluctuations. Finds for a function f(x) of n-th degree ( n= 3 or 4 ) given as f(x) =*x^n + b*x^(n-1) + c*x^(n-2) + … the numerical values of the unknown coefficients a, b, c, … owing to preset conditions. These conditions may be: a given point P(x|y) as part of the graph of the function f(x), extremum or tangent in x for f´(x), point of inflexion in x as f´´(x)=- ( f´´(x)<>0 also possible ) - or the integral I (x) =nInt( f(x), x_lower, x_upper) between two points. After calculation, the graph F1(X) of the function is plotted.
Finds for a function f(x) of n-th degree ( n= 3 or 4 ) given as f(x) =*x^n + b*x^(n-1) + c*x^(n-2) + … the numerical values of the unknown coefficients a, b, c, … owing to preset conditions. These conditions may be: a given point P(x|y) as part of the graph of the function f(x), extremum or tangent in x for f´(x), point of inflexion in x as f´´(x)=- ( f´´(x)<>0 also possible ) - or the integral I (x) =nInt( f(x), x_lower, x_upper) between two points. After calculation, the graph F1(X) of the function is plotted. This app is part of a tutorial of making custom user apps for the HP Prime. Notes of how the app is made, as well as an app itself, are included in the zip file. GeomCalc has ten geometric calculations: five areas and five volumes. Requires at least firmware 13333.
This app is part of a tutorial of making custom user apps for the HP Prime. Notes of how the app is made, as well as an app itself, are included in the zip file. GeomCalc has ten geometric calculations: five areas and five volumes. Requires at least firmware 13333. Library functions for the symbolic mode (CAS) of the Prime.
Library functions for the symbolic mode (CAS) of the Prime. Type in a numerical value and change the area units with various conversions with units that end with "meter". Inspired by Bernard Michaud's "Power of Ten Graphical".
Type in a numerical value and change the area units with various conversions with units that end with "meter". Inspired by Bernard Michaud's "Power of Ten Graphical". Does single and double interpolation.
Does single and double interpolation. Helps you interpolate or extrapolate values using the the equation of the line passing through two different points.
Helps you interpolate or extrapolate values using the the equation of the line passing through two different points. Given X and Y coordinate points of a closed area, the irregular polygon Area and C.G. are calculated. As with all of the author's spreadsheets, the blue text cells are the data input cells and the red text cells are the calculated output cells.
Given X and Y coordinate points of a closed area, the irregular polygon Area and C.G. are calculated. As with all of the author's spreadsheets, the blue text cells are the data input cells and the red text cells are the calculated output cells. Solves linear systems using the Jacobi and Gauss-Seidel Iterative Techniques. It also calculates the spectral radius of the iteration matrix.
Solves linear systems using the Jacobi and Gauss-Seidel Iterative Techniques. It also calculates the spectral radius of the iteration matrix. CAS program that calculates the Jacobian of a matrix. Also can evaluate it at a certain point.
CAS program that calculates the Jacobian of a matrix. Also can evaluate it at a certain point. Returns the interpolating Lagrange polynomial of minimum degree k for a set of points {x0, x1, …, xn}, {y0, y1, …, yn}, where 1 <= n-1 and n = 2, and depicts the plot of the function.
Returns the interpolating Lagrange polynomial of minimum degree k for a set of points {x0, x1, …, xn}, {y0, y1, …, yn}, where 1 <= n-1 and n = 2, and depicts the plot of the function.
 Allows you to perform Polynomial Regression and Multiple Linear Regression using the Least Squares technique.
Allows you to perform Polynomial Regression and Multiple Linear Regression using the Least Squares technique. Attempts to fit bivariate data to the curve y = a + b * x + c * e^x. The LSQ (least square) function is used. The output is a list of three matrices.
Attempts to fit bivariate data to the curve y = a + b * x + c * e^x. The LSQ (least square) function is used. The output is a list of three matrices. Linear solver app similar to the LSX program, in that it can also solve Complex Linear Equations in 2x2 and 3x3. Useful for those in the Electrical/Electronics field.
Linear solver app similar to the LSX program, in that it can also solve Complex Linear Equations in 2x2 and 3x3. Useful for those in the Electrical/Electronics field. Intersection and tangent points are determined for lines and circles. Also, circle center and radius are determined for three points. The row number for each type of problem is shown at the top of the spreadsheet. As with all of the author's spreadsheets, the blue text cells are the data input cells and the red text cells are the calculated output cells.
Intersection and tangent points are determined for lines and circles. Also, circle center and radius are determined for three points. The row number for each type of problem is shown at the top of the spreadsheet. As with all of the author's spreadsheets, the blue text cells are the data input cells and the red text cells are the calculated output cells. A bean machine to demonstrate the central limit theorem.
A bean machine to demonstrate the central limit theorem. Numeric math application with functions for bisection, fixed point, Newton-Raphson, and more.
Numeric math application with functions for bisection, fixed point, Newton-Raphson, and more. Programs to create an n by n matrix based on the elements of a given list. Each row has each of the elements rotated one element, either left (LSM) or right (RSM).
Programs to create an n by n matrix based on the elements of a given list. Each row has each of the elements rotated one element, either left (LSM) or right (RSM). Calculates four calculation points and three parameters of A, γ, and β of the Incomplete Gamma Law: g(x) = 1 / (β^γ * gamma(γ)) * x^(γ - 1) * e^(x/β).
Calculates four calculation points and three parameters of A, γ, and β of the Incomplete Gamma Law: g(x) = 1 / (β^γ * gamma(γ)) * x^(γ - 1) * e^(x/β). Solves numeric methods. Uses the Newton-Raphson method, the fixed point method, the Newton bisection method, the secant method, and the false position method. Shows the intermediate steps and the final result.
Solves numeric methods. Uses the Newton-Raphson method, the fixed point method, the Newton bisection method, the secant method, and the false position method. Shows the intermediate steps and the final result.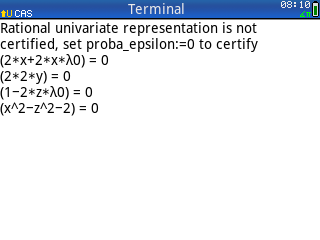 Calculates the minima and maxima of a function using Lagrange Multipliers.
Calculates the minima and maxima of a function using Lagrange Multipliers. CAS program that solves an equation using the Modified Newton-Raphson Iterative Technique.
CAS program that solves an equation using the Modified Newton-Raphson Iterative Technique. Simulates the famous Monty Hall program. You get to choose how many times the problem should run, the number of doors and if you want to change doors or not. It only shows the results (statistics) and you won't actually choose doors, or win a car or goats.
Simulates the famous Monty Hall program. You get to choose how many times the problem should run, the number of doors and if you want to change doors or not. It only shows the results (statistics) and you won't actually choose doors, or win a car or goats. Displays all functions in the CAS/Rewrite menu with their results in a popup menu on the CAS main screen. Additionally, it displays expand, proot (in second menu only), collect, and lncollect functions and their results.
Displays all functions in the CAS/Rewrite menu with their results in a popup menu on the CAS main screen. Additionally, it displays expand, proot (in second menu only), collect, and lncollect functions and their results. CAS program which solves nonlinear systems using the Newton Method. It also calculates the Jacobian matrix of the system of equations.
CAS program which solves nonlinear systems using the Newton Method. It also calculates the Jacobian matrix of the system of equations. Numeric methods by the Newton-Raphson method. Three version, for a direct result, a step-by-step result, and a version in a table similar to Excel.
Numeric methods by the Newton-Raphson method. Three version, for a direct result, a step-by-step result, and a version in a table similar to Excel. Determines whether a number between 0 and 10E9 is prime. Gives the prime numbers before and after that number.
Determines whether a number between 0 and 10E9 is prime. Gives the prime numbers before and after that number. Statistics program, where you enter the standard deviation and a guess.
Statistics program, where you enter the standard deviation and a guess. Approximates the definite integral for a given function using the Newton-Cotes Formulas (Trapezoidal Rule, Simpson 1/3 Rule and Simpson 3/8 Rule) and Gauss-Legendre Quadrature.
Approximates the definite integral for a given function using the Newton-Cotes Formulas (Trapezoidal Rule, Simpson 1/3 Rule and Simpson 3/8 Rule) and Gauss-Legendre Quadrature. Uses numeric methods to solve an equation in the form f(x) =. The iteration table is also shown. You can choose between five different numerical methods: Fixed-Point Method, Newton-Raphson Method, Secant Method, False-Position Method and Bisection Method.
Uses numeric methods to solve an equation in the form f(x) =. The iteration table is also shown. You can choose between five different numerical methods: Fixed-Point Method, Newton-Raphson Method, Secant Method, False-Position Method and Bisection Method. Determines three characteristics of a conic section: the eccentricity, perigee, and apogee, given the lengths of the semi-major axis (A) and the semi-minor axis (P).
Determines three characteristics of a conic section: the eccentricity, perigee, and apogee, given the lengths of the semi-major axis (A) and the semi-minor axis (P). Extended Euclidean algorithm program.
Extended Euclidean algorithm program. Calculates the pitch and angle of various roof heights. The pitch of a roof is the number of inches of vertical rise per 12 inches. For example: a roof of 3/12 is pitch is a roof that rises 3 inches for every 12 horizontal inches. This program demonstrates the angle computer given different roof pitches. You control the rise, anywhere for 0.5 ft to 12 ft. Use the up and down arrow keys to control the rise.
Calculates the pitch and angle of various roof heights. The pitch of a roof is the number of inches of vertical rise per 12 inches. For example: a roof of 3/12 is pitch is a roof that rises 3 inches for every 12 horizontal inches. This program demonstrates the angle computer given different roof pitches. You control the rise, anywhere for 0.5 ft to 12 ft. Use the up and down arrow keys to control the rise. From the field of Vector Algebra, finds for two planes, plane and straight line or plane and point typical properties like distance, point or line of intersection, angle between two planes.
From the field of Vector Algebra, finds for two planes, plane and straight line or plane and point typical properties like distance, point or line of intersection, angle between two planes. Given a point (xP|yP) outside a curve described by f(x), this CAS program finds one or more tangent(s) Ti(x) through (xP|yP) to the curve, the accompanying tangential point(s) (xT|yT) on f(x) and the normal line(s) Ni(x) in (xT|yT).
Given a point (xP|yP) outside a curve described by f(x), this CAS program finds one or more tangent(s) Ti(x) through (xP|yP) to the curve, the accompanying tangential point(s) (xT|yT) on f(x) and the normal line(s) Ni(x) in (xT|yT). Solves polynomials.
Solves polynomials. Very simple program to convert Power of Ten units.
Very simple program to convert Power of Ten units. Modified version of
Modified version of  Examples of the solver commands from Xcas for the Prime
Examples of the solver commands from Xcas for the Prime (
( Emulates the HP-41CX, with 320 memory registers, full XMEM (except with ED), Helios printer support, and partial timer support. Written in Python, requiring a recent firmware update.
Emulates the HP-41CX, with 320 memory registers, full XMEM (except with ED), Helios printer support, and partial timer support. Written in Python, requiring a recent firmware update. A Pythagorean triple is a trio of positive integers a, b, and c, that describe the lengths of a right triangle, where a and b are the lengths of the sides while c is the length of the hypotenuse. This program asks you for m and n and generates a Pythagorean triple. Make sure that m > n.
A Pythagorean triple is a trio of positive integers a, b, and c, that describe the lengths of a right triangle, where a and b are the lengths of the sides while c is the length of the hypotenuse. This program asks you for m and n and generates a Pythagorean triple. Make sure that m > n. Determines the population of rabbits and foxes over time as modeled by the differential equations dr/dt = 2 * r - α * r * f and df/dt = -f + α * r * f. Includes two versions, one which gives numerical results and one which plots the results.
Determines the population of rabbits and foxes over time as modeled by the differential equations dr/dt = 2 * r - α * r * f and df/dt = -f + α * r * f. Includes two versions, one which gives numerical results and one which plots the results. Generates a list of the requested number of random numbers with the numbers in the specified range. Has functions to also exclude specific numbers, include specific numbers, or generate only numbers from a given list.
Generates a list of the requested number of random numbers with the numbers in the specified range. Has functions to also exclude specific numbers, include specific numbers, or generate only numbers from a given list. Four CAS functions that solve ordinary differential (system of) equations using the following methods: Euler method, Heun Method (also known as Modified Euler method), third-order Runge-Kutta method and fourth-order Runge-Kutta method.
Four CAS functions that solve ordinary differential (system of) equations using the following methods: Euler method, Heun Method (also known as Modified Euler method), third-order Runge-Kutta method and fourth-order Runge-Kutta method. Calculates some geometric properties for figures made from rectangles, like W section or so.
Calculates some geometric properties for figures made from rectangles, like W section or so. Shows a miniature version of the famous Sieve of Eratosthenes. The Sieve of Eratosthenes is a Greek algorithm that determines prime numbers from 2 to N through eliminating multiplies.
Shows a miniature version of the famous Sieve of Eratosthenes. The Sieve of Eratosthenes is a Greek algorithm that determines prime numbers from 2 to N through eliminating multiplies. Linear programming by the Simplex 2 phase method.
Linear programming by the Simplex 2 phase method. Solves linear programs using the simplex method, providing a pure integer solution, or a mixed integer, continuous and binary solution. Lets you save and reload data, set target Z value, import data from spreadsheet, and use user definable variable names.
Solves linear programs using the simplex method, providing a pure integer solution, or a mixed integer, continuous and binary solution. Lets you save and reload data, set target Z value, import data from spreadsheet, and use user definable variable names. Using Simpson's Rule, approximates the integral of f(X): ∫f(X)dX=h/2*(f(a)+2*Σf(x_E)+4*∑f(x_O)+f(b)) where a is the lower limit, b is the upper limit, n is the number of intervals and is even, h is (b–a)/n, x_E is a+h*I where I is from 1 to n-1 and I is even, and x_O is a+h*I where I is from 1 to n-1 and I is odd.
Using Simpson's Rule, approximates the integral of f(X): ∫f(X)dX=h/2*(f(a)+2*Σf(x_E)+4*∑f(x_O)+f(b)) where a is the lower limit, b is the upper limit, n is the number of intervals and is even, h is (b–a)/n, x_E is a+h*I where I is from 1 to n-1 and I is even, and x_O is a+h*I where I is from 1 to n-1 and I is odd. Probability simulator, letting you flip coins, roll a 6-sided die, spin a 4-numbered/colored spinner, take a colored ball out of an urn, deal 5 cards, or get random numbers.
Probability simulator, letting you flip coins, roll a 6-sided die, spin a 4-numbered/colored spinner, take a colored ball out of an urn, deal 5 cards, or get random numbers. Simultaneous linear equation solver which solves 2x2 and 3x3 equations in Real and Complex mode. Mimics HP Linear Solve App, with Inputs and Outputs on the same screen. To return to Menu: Check Menu[] box and [Ok].
Simultaneous linear equation solver which solves 2x2 and 3x3 equations in Real and Complex mode. Mimics HP Linear Solve App, with Inputs and Outputs on the same screen. To return to Menu: Check Menu[] box and [Ok]. A method for combining experimental results. The idea is this: if we "trust" the values and error bars reported by the various experimenters, the usual recipe for computing a weighted average and overall error bar is fine. But if the error bars are inflated or deflated (intentional or unintentional), the Bayesian approach allows for some "slop" in the error bars and finds optimal agreement between the experiments. For instance, if one experiment reports a value with small error bars that is quite different from other experiments, the usual weighted average calculation will be dominated by that "rogue" experiment. This does not happen with the Bayesian (SKEPTIC) recipe.
A method for combining experimental results. The idea is this: if we "trust" the values and error bars reported by the various experimenters, the usual recipe for computing a weighted average and overall error bar is fine. But if the error bars are inflated or deflated (intentional or unintentional), the Bayesian approach allows for some "slop" in the error bars and finds optimal agreement between the experiments. For instance, if one experiment reports a value with small error bars that is quite different from other experiments, the usual weighted average calculation will be dominated by that "rogue" experiment. This does not happen with the Bayesian (SKEPTIC) recipe. Helps you to find the distance, the slope and the equation between two points, the perpendicular distance between a point and a straight line, collinearity of three points (the middle-point and the end-point coordinates), the equation of a straight line that goes through a point with a slope, transforms linear equations back and forth between standard and slope-intercept forms, generates the coordinate representation of a straight line, determines whether two straight lines are parallel or perpendicular, finds the (x) & (y) intercepts of a straight line, finds the intersection point of 2 straight lines, transforms a non-standard form equation into a standardized form of it, divide a segment into points or sub-segments, performs linear interpolation/extrapolation. Requires firmware 10077 or higher.
Helps you to find the distance, the slope and the equation between two points, the perpendicular distance between a point and a straight line, collinearity of three points (the middle-point and the end-point coordinates), the equation of a straight line that goes through a point with a slope, transforms linear equations back and forth between standard and slope-intercept forms, generates the coordinate representation of a straight line, determines whether two straight lines are parallel or perpendicular, finds the (x) & (y) intercepts of a straight line, finds the intersection point of 2 straight lines, transforms a non-standard form equation into a standardized form of it, divide a segment into points or sub-segments, performs linear interpolation/extrapolation. Requires firmware 10077 or higher. Solves systems of non-linear equations. Equations are used in a form where the result should be zero. Nelder Mead Optimization is used to find a minimum of the sum of squared results. If the minimum is zero, the solution is found.
Solves systems of non-linear equations. Equations are used in a form where the result should be zero. Nelder Mead Optimization is used to find a minimum of the sum of squared results. If the minimum is zero, the solution is found. Intended to replicate and combine programs from the HP 48 series of calculators for organizing equations and launching an equation solver. This app attempts to allow users to build their own equations library. The user can then also launch a numerical solver. This app implements the Newton-Raphson algorithm for solving a system of equations. In order to handle ill-conditioned, over-determined, under-determined, rank-deficient (etc.) Jacobian matrices, the SVD is used to determine the pseudo-inverse of the Jacobian (the pseudo-inverse coincides with the regular inverse of a matrix for non-singular matrices). Includes a copy of the equation library from the HP 48/49 series to get you started, including all the graphics. Also includes a more accurate version that requires
Intended to replicate and combine programs from the HP 48 series of calculators for organizing equations and launching an equation solver. This app attempts to allow users to build their own equations library. The user can then also launch a numerical solver. This app implements the Newton-Raphson algorithm for solving a system of equations. In order to handle ill-conditioned, over-determined, under-determined, rank-deficient (etc.) Jacobian matrices, the SVD is used to determine the pseudo-inverse of the Jacobian (the pseudo-inverse coincides with the regular inverse of a matrix for non-singular matrices). Includes a copy of the equation library from the HP 48/49 series to get you started, including all the graphics. Also includes a more accurate version that requires  Solves quadratic equations in a step-by-step fashion. Requires
Solves quadratic equations in a step-by-step fashion. Requires  Performs symbolic time to frequency and frequency to time calculations: calculates for a given symbolic f(t) Fourier, Laplace and Z-transformation in symbolic form, draws the complex Laplace function together with the Fourier transformation slice as a 3D plot, and calculates for a given frequency transfer function the unity pulse, dirac pulse response and bode magnitude and phase in symbolic form. Includes PDF documentation.
Performs symbolic time to frequency and frequency to time calculations: calculates for a given symbolic f(t) Fourier, Laplace and Z-transformation in symbolic form, draws the complex Laplace function together with the Fourier transformation slice as a 3D plot, and calculates for a given frequency transfer function the unity pulse, dirac pulse response and bode magnitude and phase in symbolic form. Includes PDF documentation. From the field of Vector Algebra, finds for two straight lines L1 and L2 the distance between the lines, the points P1 and P2 of minimal distance on both lines, the intersection angle and checks, whether the lines are parallel, skew or have a common point of intersection. If the direction vector of L2 is entered as [0], the problem is handled as straight line L1 and point P. In this case the program finds the distance, the base point of perpendicular Pn, perpendicular vector P_ and the reflected point P0'.
From the field of Vector Algebra, finds for two straight lines L1 and L2 the distance between the lines, the points P1 and P2 of minimal distance on both lines, the intersection angle and checks, whether the lines are parallel, skew or have a common point of intersection. If the direction vector of L2 is entered as [0], the problem is handled as straight line L1 and point P. In this case the program finds the distance, the base point of perpendicular Pn, perpendicular vector P_ and the reflected point P0'. Does calculations related to summations and series.
Does calculations related to summations and series. Given a positive integer n, it can be possible to find two non-negative integers x and y such that n = x^2 + y^2. This program uses iterations to find all possible pairs which fit n = x^2 + y^2. Some integers do not have representations, others have more than one. The program will show all possible combinations.
Given a positive integer n, it can be possible to find two non-negative integers x and y such that n = x^2 + y^2. This program uses iterations to find all possible pairs which fit n = x^2 + y^2. Some integers do not have representations, others have more than one. The program will show all possible combinations. Finds the solution to a system of two dífferential equations given as d(y1)/dx =*y1 + b*y2 + f(x) and d(y2)/dx =*y1 + d*y2 +g(x). For initial values x0, y1(x0), y2(x0) the constants of integration are calculated. A graph of both functions y1, y2 is provided.
Finds the solution to a system of two dífferential equations given as d(y1)/dx =*y1 + b*y2 + f(x) and d(y2)/dx =*y1 + d*y2 +g(x). For initial values x0, y1(x0), y2(x0) the constants of integration are calculated. A graph of both functions y1, y2 is provided. This CAS program finds the normal (or perpendicular) line N(x) through a given point (xN,yN) to the curve of a given function f(x) and additionally computes the tangent in the common intersection point (xT,yT) of curve and N(x).
This CAS program finds the normal (or perpendicular) line N(x) through a given point (xN,yN) to the curve of a given function f(x) and additionally computes the tangent in the common intersection point (xT,yT) of curve and N(x). Two trains are heading towards each other, on their own separate train track. Each train has going at their own speed (velocity). The trains start out a distance apart. This program calculates when and where the trains will cross over the same spot.
Two trains are heading towards each other, on their own separate train track. Each train has going at their own speed (velocity). The trains start out a distance apart. This program calculates when and where the trains will cross over the same spot. Solves Linear Programming exercises with the simplex method (variants of Constraints ≤, Gran M, Two Phases, Dual Simplex) and the Graphic method. Now with Lexicographic tests.
Solves Linear Programming exercises with the simplex method (variants of Constraints ≤, Gran M, Two Phases, Dual Simplex) and the Graphic method. Now with Lexicographic tests. Calculates the midsegment, height, and area of a trapezoid.
Calculates the midsegment, height, and area of a trapezoid. Using the Trapezoidal Rule, approximates the integral of f(X): ∫f(X)dX=h/2*(f(a)+2*Σf(x_I)+f(b)), where a is the lower limit, b is the upper limit, n is the number of intervals, h is (b–a)/n, and x_I is a+h*I where I is from 1 to n-1.
Using the Trapezoidal Rule, approximates the integral of f(X): ∫f(X)dX=h/2*(f(a)+2*Σf(x_I)+f(b)), where a is the lower limit, b is the upper limit, n is the number of intervals, h is (b–a)/n, and x_I is a+h*I where I is from 1 to n-1. A simple spreadsheet to solve for three unknowns given three known. (3 Sides and 3 Angles) As with all of the author's spreadsheets, the blue text cells are the data input cells and the red text cells are the calculated output cells.
A simple spreadsheet to solve for three unknowns given three known. (3 Sides and 3 Angles) As with all of the author's spreadsheets, the blue text cells are the data input cells and the red text cells are the calculated output cells. Triangle solver that allows you to set the accuracy of the result, solve right triangles, solve any other triangles, calculate the length of a line using two coordinate points, and calculate the centroid of a triangle plus the three line lengths. Includes PDF documentation.
Triangle solver that allows you to set the accuracy of the result, solve right triangles, solve any other triangles, calculate the length of a line using two coordinate points, and calculate the centroid of a triangle plus the three line lengths. Includes PDF documentation. Diagram of the unit circle for trigonometric math.
Diagram of the unit circle for trigonometric math.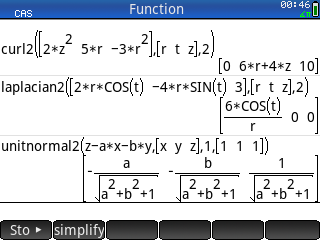 A collection of some of the most common Vector Calculus functions for rectangular, cylindrical, and spherical coordinates. Includes curl, div, Jacobian, Laplacian, unit normal, and more.
A collection of some of the most common Vector Calculus functions for rectangular, cylindrical, and spherical coordinates. Includes curl, div, Jacobian, Laplacian, unit normal, and more. Creates a list with station and elevation information in L0. If a value between the VPC and VPT is entered in "Special Station", it returns data for that station only, if left at 0 the entire curve will be returned at the interval specified.
Creates a list with station and elevation information in L0. If a value between the VPC and VPT is entered in "Special Station", it returns data for that station only, if left at 0 the entire curve will be returned at the interval specified. Program to get a unit vector from a vector with N elements.
Program to get a unit vector from a vector with N elements. Uses the Wallis-Wasicki formula to calculate pi.
Uses the Wallis-Wasicki formula to calculate pi. Calculates the Wilson Score interval, a good way for ranking things like popularity and skill of video game players, given the total number of trials and the number of "likes".
Calculates the Wilson Score interval, a good way for ranking things like popularity and skill of video game players, given the total number of trials and the number of "likes".